Par : Rénald Fortier
Ingenium - Musées des sciences et de l’innovation du Canada


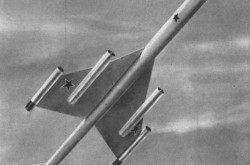
Permettez-moi de commencer en espérant que le titre de cet article n’offensera aucune personne impliquée dans le développement du véhicule au cœur de celui-ci. Le projet SHARP est une réalisation vraiment remarquable, comme on le voit sur la couverture du numéro de janvier 1988 du mensuel américain Popular Science.
Les satellites de communication one révolutionné le monde dans lequel nous vivons. Ces merveilles techniques sont malheureusement extrêmement coûteuses et difficiles à réparer. Les tours de communication sont beaucoup moins chères à construire et à maintenir, mais leur portée effective est très limitée. Ne serait-ce pas super si une sorte de technologie intermédiaire pouvait être développée pour combler l’écart? La vérité est que cette technologie existe et est étudiée à partir de la fin des années 1950. Mieux encore, des ingénieurs canadiens jouent un rôle important dans cette recherche. Le type d’aéronef sans pilote que nous examinons ici est connu sous différents noms au cours des années, certains officiels, d’autres plus informels - de répéteur à haute altitude à satellite du pauvre monde.
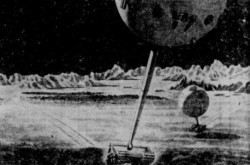
L’idée de base de ce qui devient le Répéteur stationnaire de haute-altitude, ou Stationary High-Altitude Relay Platform (SHARP), est conçue vers 1980, à Ottawa, Ontario. L’objectif des chercheurs est de développer un aéronef sans pilote capable de voler à haute altitude (21 000 mètres / 69 000 pieds) au-dessus d’une zone spécifique de la Terre, pendant des mois, afin de servir de station relais pour les télécommunications sans fil et les services de radiodiffusion. Ce véhicule fournirait des services de communication à une fraction du coût d’un satellite.
Ne sachant pas à quoi ressemblerait un tel aéronef sans pilote ou comment il recevrait son énergie, le ministère des Communications fédéral signe un contrat en 1981 avec SED Systems Limited de Saskatoon, Saskatchewan, pour mener une étude. Dans le cadre de ce contrat, cette dernière peut également avoir travaillé sur le choix des sources d’énergie. Les travaux sur la configuration la plus appropriée du véhicule sont réalisés en Ontario par une équipe du University of Toronto Institute for Aerospace Studies (UTIAS) dirigée par James Duncan DeLaurier, PhD.
Il convient de noter que DeLaurier est par la suite impliqué dans le développement de machines volantes à ailes battantes, ou ornithoptères. En collaboration avec Jeremy M. Harris, il conçoit le Great Flapper, un ornithoptère motorisé et piloté, en 1996. Le développement de cette machine volante unique s’avère extrêmement difficile. Au début de juillet 2006, le pilote du Great Flapper, Jack Sanderson, parcourt une distance d’environ 300 mètres (1 000 pieds). Ce vol de 17 secondes, rendu possible par l’installation d’un moteur à réaction miniature, est, encore au début de 2018, le plus long jamais atteint par un ornithoptère piloté motorisé. Et oui, le Great Flapper fait maintenant partie de la collection du Musée de l’aviation et de l’espace du Canada, à Ottawa. Mais revenons à notre histoire.
Le programme de recherche qui mène à la création du SHARP débute sérieusement en 1982, à la Direction des communications radio du Centre de recherches sur les Communications (CRC) du ministère des Communications, à Ottawa – une organisation connue en 2018 sous le nom de Centre de recherches sur les Communications Canada. Il implique trois équipes distinctes du CRC, de UTIAS, et de Miller Communications Systems Limited de Kanata, près d’Ottawa.
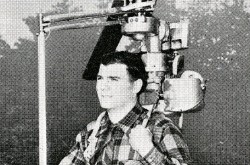
Compte tenu des limites des cellules solaires pour un pays nordique comme le Canada, les chercheurs décident d’alimenter le moteur électrique de leur véhicule avec des micro-ondes émises du sol par un groupe d’antennes. Les chercheurs du CRC passent beaucoup de temps à développer des antennes de réception minces, petites et légères, ou antennes rectificatrices, qui reçoivent ces micro-ondes – un élément clé dans le développement de toute machine à micro-ondes. D’autres travaillent sur le système de production et de transmission des micro-ondes situé au sol. Miller Communications Systems, une société d’ingénierie électrique, travaille également sur le système de transmission de micro-ondes du SHARP. De plus, elle développe un émetteur de démonstration et un système d’antenne.
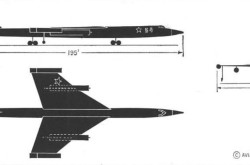
L’équipe de UTIAS est responsable du développement du véhicule proprement dit. Elle examine et rejette quelques options. Un hélicoptère aurait eu des problèmes de poids. Si le ballon ou le dirigeable offre certains avantages, l’équipe finit par favoriser une plate-forme de type avion. Les antennes rectificatrices et le moteur électrique avec son hélice représentent la majeure partie du poids du SHARP. À l’époque, on pense que le véhicule pourra atteindre son altitude de croisière derrière un avion de remorquage ou sous un ballon. Au début, il pourra rester en l’air jusqu’à 2 ou 3 mois avant de descendre pour un contrôle. Plus tard, le SHARP pourra rester en vol pendant une année entière.
En fin de compte, le résultat final de toute cette recherche est un système bien pensé. Un groupe de petites antennes paraboliques enverrait des micro-ondes au SHARP alors que celui-ci effectuerait un parcours circulaire, peu importe la force du vent. L’énorme machine aurait une portée de diffusion de 500 à 600 kilomètres (de 300 à 375 milles), soit plus ou moins la largeur de l’une des provinces de l’Ouest canadien et 20 fois plus qu’une tour de communication typique. Même si un ordinateur de bord doit piloter le SHARP automatiquement, il serait possible de contrôler le véhicule à partir du sol, en utilisant le faisceau de micro-ondes pour transporter les signaux de commande. Le haut du fuselage et de l’aile serait couvert de cellules solaires, tandis que le dessous de ces mêmes fuselage et aile serait couvert d’antennes rectificatrices recevant les micro-ondes. Les cellules solaires alimenteraient le SHARP au moment du lancement et aideraient à charger les batteries embarquées. Ces batteries alimenteraient le système de communication pendant un certain temps si le faisceau de micro-ondes était perdu.
Un système SHARP pourrait fournir des services de communication pour une fraction du coût d’un satellite. S’il est vrai qu’un tel satellite peut fonctionner environ 10 ans, un SHARP pourrait revenir au sol à tout moment pour la maintenance, les réparations, le remplacement ou les mises à jour. L’utilisation de quelques SHARP plutôt que d’un seul satellite augmenterait également la flexibilité du système. Plus d’utilisateurs pourraient utiliser les mêmes fréquences sans interférence.
Si les avantages du SHARP pour un pays énorme comme le Canada sont évidents, les pays en développement peuvent aussi le trouver très intéressant. En effet, il peut fournir un service dans des régions qui ne sont pas survolées par des satellites. Un SHARP peut également être équipé d’un radar pour surveiller les zones de pêche exclusive de 200 milles marins (370 kilomètres / 230 milles) du Canada, pour voir si des navires étrangers pêchent illégalement. Le SHARP peut aussi être utilisé pour la télédétection ou la surveillance environnementale (pluie acide ou changement climatique).
Votre humble serviteur est d’avis que c’est probablement assez pour aujourd’hui. Je sais à quel point vous êtes déçu(e), ami(e) lectrice ou lecteur, mais il vous faudra attendre jusqu’à la semaine prochaine pour la seconde partie de cet article.












































































































































![Peter Müller aux commandes [sic] du Pedroplan, Berlin, Allemagne, mars 1931. Anon., « Cologne contre Marseille – Le mystère du ‘Pédroplan.’ [sic] » Les Ailes, 2 avril 1931, 14.](/sites/default/files/styles/thumbnail_7/public/2021-04/Les%20Ailes%202%20avril%201931%20version%20big.jpg?h=eafd0ed4&itok=WnBZ5gMf)









![Un des premiers de Havilland Canada Chipmunk importés au Royaume-Uni. Anon., « De Havilland [Canada] DHC-1 ‘Chipmunk.’ » Aviation Magazine, 1er janvier 1951, couverture.](/sites/default/files/styles/thumbnail_7/public/2021-01/Aviation%20magazine%201er%20janvier%201951%20version%202.jpg?h=2f876e0f&itok=DM4JHe5C)